


ماژول WT901-AHRS
WT901 Attitude Angle Sensor
- Input voltage: 3.3V-5V
- Consumption current: <25mA
- Volume: 15.24mm X 15.24mm X 2mm
- Pad pitch: up and down 100mil (2.54mm), left and right 600mil (15.24mm)
* فروش حضوري نداريم . تحويل حضوري : پس ازثبت سفارش و پرداخت فاكتور براي تحويل حضوري كالا به شما اطلاع داده مي شود.
* پرداخت آنلاين غير فعال است - سفارش خود را ثبت و نهايي بفرماييد.
* پس از تاييد موجودي و قیمت ، فاكنور و شماره كارت بانكي از طريق اپليكيشن پيام رسان بله و پيامك ارسال مي گردد.
1,540,000 تومان
ناموجود
ماژول WT901-AHRS
ماژول WT901-AHRS سنسور برای اندازهگیری زاویه وضعیت (Attitude Angle) در سه محور X، Y و Z طراحی شده است. از ترکیب دادههای ژیروسکوپ، شتابسنج و سنسور مغناطیسی با الگوریتم فیلتر کالمن برای محاسبه دقیق زاویه استفاده میکند. این سنسور در کاربردهایی مانند ناوبری، رباتیک، سیستمهای تعادل و پهپادها کاربرد دارد.
مشخصات فنی اصلی:
ولتاژ کاری: ۳.۳ تا ۵ ولت DC
جریان مصرفی : کمتر از ۲۵ میلیآمپر
ابعاد : ۱۵.۲۴ × ۱۵.۲۴ × ۲ میلیمتر
دقت زاویه : ±۰.۰۵° (استاتیک)، ±۰.۱° (دینامیک)
دقت شتابسنج : ۰.۰۱g
محدوده شتابسنج : ±۲g، ±۴g، ±۸g، ±۱۶g (قابل انتخاب)
محدوده ژیروسکوپ : ±۲۵۰°/s، ±۵۰۰°/s، ±۱۰۰۰°/s، ±۲۰۰۰°/s (قابل انتخاب)
نرخ خروجی داده : ۰.۱Hz تا ۲۰۰Hz (قابل تنظیم)
رابطهای ارتباطی : سریال (TTL) با نرخ ۲۴۰۰ تا ۹۲۱۶۰۰ bps، I2C با نرخ ۴۰۰Kbps
پورتهای توسعه : ۴ پورت (D0-D3) با قابلیتهای ورودی آنالوگ/دیجیتال، خروجی PWM و دیجیتال
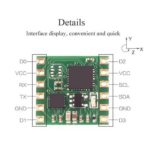
ورودی و خروجیها:
– ورودیها:
– منبع تغذیه: ۳.۳V یا ۵V (از طریق پین VCC و GND).
– دادههای GPS: از طریق رابط سریال (اتصال به ماژول GPS خارجی).
– پورتهای توسعه: ورودی آنالوگ (۰ تا VCC)، ورودی دیجیتال.
– خروجیها:
– دادههای سنسور: زمان، شتاب (۳ محور)، سرعت زاویهای (۳ محور)، زاویه وضعیت (۳ محور)، میدان مغناطیسی (۳ محور)، فشار هوا (مدل WT901B)، ارتفاع (مدل WT901B)، مختصات GPS (با اتصال خارجی).
– پورتهای توسعه: خروجی دیجیتال، PWM (با قابلیت تنظیم دوره و عرض پالس).
ویژگیهای کلیدی:
– الگوریتم فیلتر کالمن: بهبود دقت در محیطهای پویا.
– کالیبراسیون آسان: امکان کالیبراسیون شتابسنج، ژیروسکوپ و سنسور مغناطیسی از طریق نرمافزار.
– پورتهای توسعه چندمنظوره: پیکربندی پورتها به عنوان ورودی/خروجی آنالوگ، دیجیتال یا PWM.
– سازگاری با GPS: پشتیبانی از دادههای NMEA-0183 برای دریافت مختصات جغرافیایی.
– طراحی فشرده: ابعاد کوچک و قابلیت نصب روی PCB کاربر.
نکات مهم:
1. کالیبراسیون اولیه: برای دستیابی به دقت بالا، سنسور باید قبل از استفاده کالیبره شود.
2. اتصال GPS: سنسور فاقد ماژول GPS داخلی است و نیاز به اتصال خارجی دارد.
3. محدوده دمایی: دمای کاری سنسور بین -۴۰°C تا ۸۵°C است.
4. پیکربندی پورتها: پورتهای D0-D3 را میتوان برای کاربردهای خاص مانند کنترل موتور یا خواندن سنسورهای خارجی پیکربندی کرد.
5. جبران مغناطیسی: در محیطهای با نویز مغناطیسی، کالیبراسیون میدان مغناطیسی ضروری است.
کاربردها:
– سیستمهای ناوبری و تعیین موقعیت.
– رباتیک و پهپادها.
– تجهیزات پزشکی و ورزشی.
– سیستمهای تعادل و تثبیت کنندهها.
– خودروهای خودران و صنایع هوافضا.
برای ثبت نقد و بررسی وارد حساب کاربری خود شوید.

دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.